包围盒
定义包围盒
struct BoundBox
{
BoundBox();
bool isPointInside(D3DXVECTOR3& p);
D3DXVECTOR3 _min;
D3DXVECTOR3 _max;
};
BoundBox::BoundBox()
{
_min.x = -Infinity;
_min.y = -Infinity;
_min.z = -Infinity;
_max.x = Infinity;
_max.y = Infinity;
_max.z = Infinity;
}
bool BoundBox::isPointInside(D3DXVECTOR3& p)
{
if (p.x >= _min.x && p.y >= _min.y && p.z >= _min.z &&
p.x <= _max.x && p.y <= _max.y && p.z <= _max.z)
{
return true;
}
else
{
return false;
}
}
|
声明变量
ID3DXMesh* BoxMesh = 0;
const float Infinity = FLT_MAX;
BoundBox boundingBox;
|
创建包围盒
加载模型
bool ComputeBoundingBox(ID3DXMesh* mesh, BoundBox* box)
{
HRESULT hr = 0;
BYTE* v = 0;
mesh->LockVertexBuffer(0, (void**)&v);
hr = D3DXComputeBoundingBox(
(D3DXVECTOR3*)v,
mesh->GetNumVertices(),
D3DXGetFVFVertexSize(mesh->GetFVF()),
&box->_min,
&box->_max);
mesh->UnlockVertexBuffer();
if (FAILED(hr))
return false;
return true;
}
ComputeBoundingBox(Mesh, &boundingBox);
D3DXCreateBox(
g_pd3dDevice,
boundingBox._max.x - boundingBox._min.x,
boundingBox._max.y - boundingBox._min.y,
boundingBox._max.z - boundingBox._min.z,
&BoxMesh,
0);
|
绘制包围盒
绘制模型
D3DMATERIAL9 white = white_mtrl;
white.Diffuse.a = 0.50f;
g_pd3dDevice->SetMaterial(&white);
if (boundingBox.isPointInside(D3DXVECTOR3(1, 1, 1)))
{
g_pd3dDevice->SetRenderState(D3DRS_FILLMODE, D3DFILL_WIREFRAME);
BoxMesh->DrawSubset(0);
g_pd3dDevice->SetRenderState(D3DRS_FILLMODE, D3DFILL_SOLID);
}
|
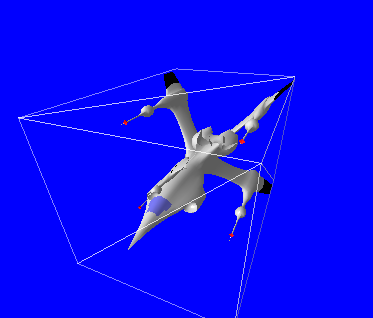
效果